Research
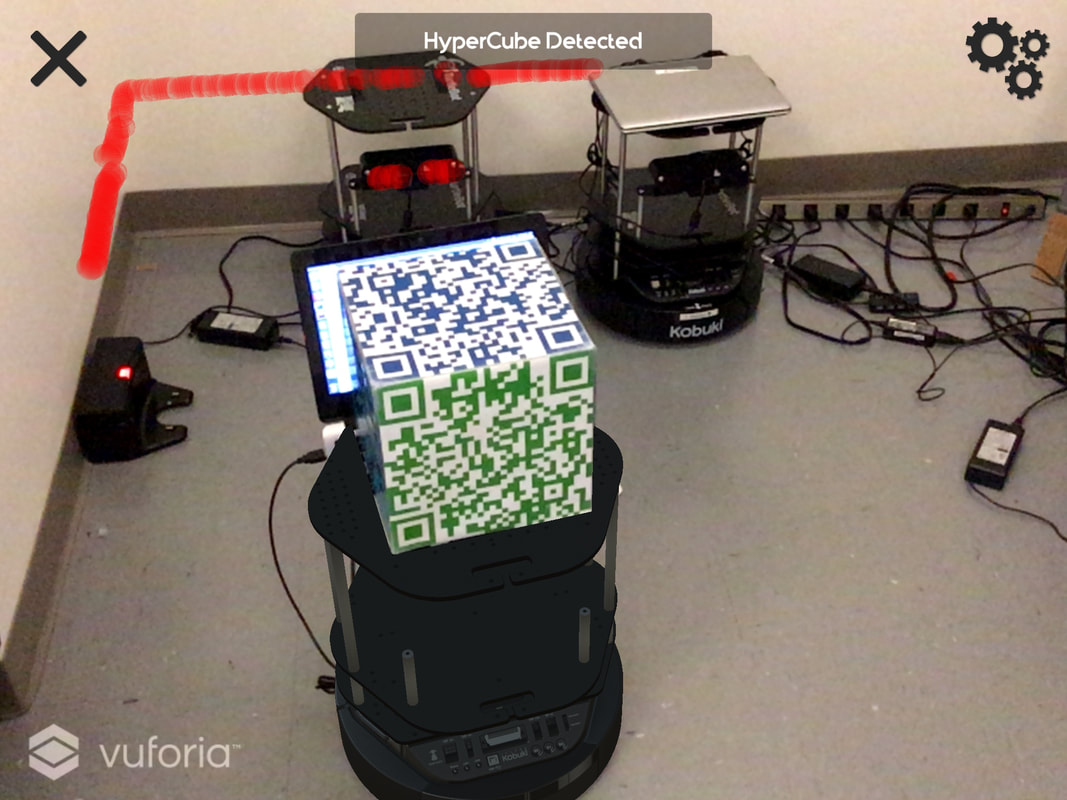
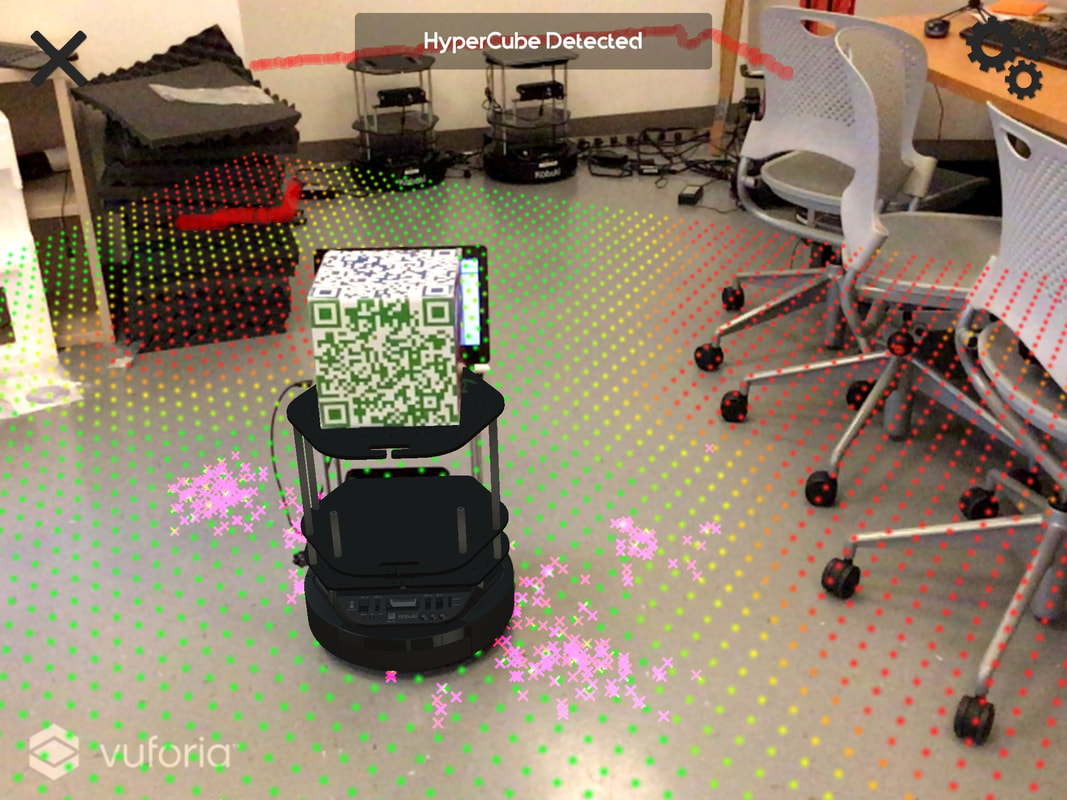
Augmented Reality Frame Work in Unity for ROSAs a LaidLaw recipient, I am conducting a research project over the course of two consecutive summers under the assistance of my mentor, Jivko Sinapov and alongside peers. We are working on creating a platform using Unity to project what a robot perceives in augmented reality. Our goal is to improve human and robot interaction, while making it easier to debug a robot. Deploying our app, named HyperCube, to hololens, android, and iOS allows us to view the robot's path, laser scan reading, costmap, localization particles, and people detector. Check out the photos and videos below!
|
|
    |
